College of Liberal Arts & Sciences
1Q60.81 - Dynamic Balancing - Tensor


Code Number:
References:
1Q60.81
Demo Title:
Dynamic Balancing - Tensor
Condition:
Good
Principle:
Dynamic vs. Static Balancing.
Area of Study:
Mechanics
Equipment:
Bicycle wheel without tire or leaded rim from the display case. C - clamps or mounting clamps.
Procedure:
Mount the clamps opposite each other on the same side ( front side ) of the rim. Note how the wheel spins smoothly when rotating rapidly. ( You will probably have to move one of the clamps right or left slightly to achieve a good balance. ) Now move only one of the clamps to the other side ( rear side ) of the wheel. While the static balance still remains, the axle will shake violently when spun because of poor dynamic balance.
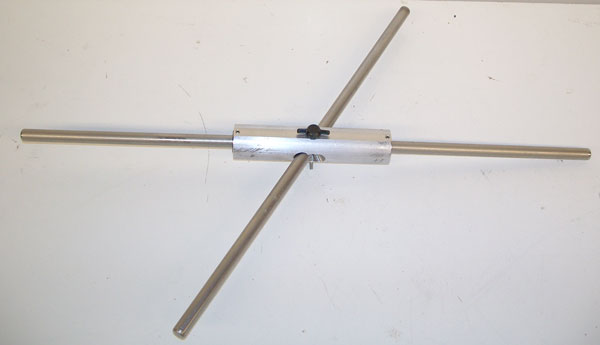
The "cross" unit with bearings works very well. Change the dynamic balance parameters by moving the rod to any of the straight or diagonal holes.
The wooden and nylon demos show a precession about the axis of rotation. Hold them so that one end of the axle is in each hand. Throw into the air and at the same time spin the demo about the axis. The demo will process as it spins and falls through the air.
The cross unit with bearings and the wooden and nylon demos are also a tensor example. See the first two references below for the explanation.
- Clifton Bob Clark, Stuart Thompson, "Dynamical Balance and the Rotating Rod - A Personal Demonstration", TPT, Vol. 26, # 4, April 1988, p. 237.
- A. F. Burr, "Non-Colinearity of Angular Velocity and Angular Momentum", AJP, Vol. 42, #2, Feb. 1974, p. 100.
- Richard C. Smith, "Static vs. Spin Balancing of Automobile Wheels", AJP, Vol. 40, #1, Jan. 1972, p. 199.
- M- 720: "Wheel With Weights-Assym. Rotator", DICK and RAE Physics Demo Notebook.
- Jearl Walker, 1.176, "Balancing a Tire", The Flying Circus of Physics", p. 78.
Disclaimer: These demonstrations are provided only for illustrative use by persons affiliated with The University of Iowa and only under the direction of a trained instructor or physicist. The University of Iowa is not responsible for demonstrations performed by those using their own equipment or who choose to use this reference material for their own purpose. The demonstrations included here are within the public domain and can be found in materials contained in libraries, bookstores, and through electronic sources. Performing all or any portion of any of these demonstrations, with or without revisions not depicted here entails inherent risks. These risks include, without limitation, bodily injury (and possibly death), including risks to health that may be temporary or permanent and that may exacerbate a pre-existing medical condition; and property loss or damage. Anyone performing any part of these demonstrations, even with revisions, knowingly and voluntarily assumes all risks associated with them.