College of Liberal Arts & Sciences
3A50.10 - Simple Harmonic Motion - Damped Mass on Spring



Code Number:
References:
3A50.10
Demo Title:
Simple Harmonic Motion - Damped Mass on Spring
Condition:
Good
Principle:
Simple Harmonic Motion
Area of Study:
Acoustics
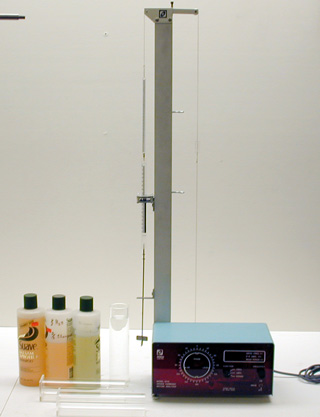
Equipment:
Aluminum Rod Weight on Linear Spring, Tall Glass Cylinders, Water, Shampoo, Shampoo and Water Solutions of Different Concentrations, Pasco Harmonic Motion Analyzer, Copper Plates, Computer, and Interface with Motion Sensor.
Procedure:
Place the desired copper plate on the bottom of the rod. Hang it over the edge of the table so that you can place the motion sensor on the floor facing up at the plate. Start the plate in motion with about a 45 cm up and down oscillation and observe the damping curve in real time on the computer.
Place the rod in one of the glass cylinders so that it can move up and down freely. Fill the cylinder with water and observe the time for 10 oscillations. Now place the rod in a cylinder that has shampoo in it and again observe the time for 10 oscillations. If desired with the use of the cardboard plate at the top of the rod you may do measurements with the sonic sensors and computer interface.
The Pasco harmonic motion analyzer can be used for this demonstration also. Put the desired amount of damping liquid in a cylinder and place it under the oscillator. Do not turn on the analyzer, just pull up or down on the spring and release. The amplitude and the frequency can still be read out on the analyzer.
- Rod Cross, "A Simple Method to Estimate Q for a Damped Oscillation", TPT, Vol. 62, #5, May 2024, p. 406.
- Arne Bewersdorff, David Weiler, "Unveiling Damped Spring Pendulum Dynamics and Constants Through Smartphone-Integrated LiDAR Sensors", TPT, Vol. 62, #3, March 2024, p. 230.
- Marciano Santamaria Lezcano, Evgeni Svenk Cruz de Gracia, Lucio Strazzabosco Dorneles, "Damped Oscillations - A Smartphone Approach", TPT, Vol. 62, #2, Feb. 2024, p. 123.
- Garima Goyal, Aastha Jain, Dheeraj Kumar Singh, "Estimating Damping Effects Using a Smartphone", TPT, Vol. 61, #8, Nov. 2023, p. 708.
- Asif Shakur and Jeffrey Emmert, "Damped Oscillations with a Smart Cart", TPT, Vol. 57, #7, Oct. 2019, p. 490.
- M. I. Molina, "Authors Response", TPT, Vol. 43, #4, Apr. 2005, p. 197.
- Daniel Hoyt, "More on Damped Oscillators", TPT, Vol. 43, #4, Apr. 2005, p. 196.
- M. I. Molina, "Exponential Versus Linear Amplitude Decay in Damped Oscillators", TPT, Vol. 42, #8, Nov. 2004, p. 485.
- Michael C. LoPresto and Paul R. Holody, "Drag Forces, Authors' Response", TPT, Vol. 41, #5, May 2003, p. 262.
- A. John Mallinckrodt, "Drag Forces", TPT, Vol. 41, #5, May 2003, p. 261.
- Michael C. Lopresto and Paul R. Holody, "Measuring the Damping Constant for Underdamped Harmonic Motion", TPT, Vol. 41, #1, Jan 2003, p. 22.
- James C. Kernohan, "Another Use for the Sonic Ranger", TPT, Vol. 36, #2, Feb. 1998, p. 126.
- Clifton Bob Clark and Clifford E. Swartz, "Analytic Solution for the Oscillator with Classical Friction", TPT, Vol. 34, #9, Dec. 1996, p. 550.
- John A. Varriano, "Energy Diagrams with Drag Forces", TPT, Vol. 34, #9, Dec. 1996, p. 546.
- Wei Lee, "Damped Harmonic Oscillator", TPT, Vol. 30, #7, Oct. 1992, p. 388.
- Kevin Campbell and Don Easton, "'Bad' Vibes: The Damped Oscillator", TPT, Vol. 30, #5, May 1992, p. 318.
- Michael T. Frank and Edward Kluk, "Equations of Motion on a Computer Spreadsheet: The Damped Harmonic Oscillator and More", TPT, Vol. 28, #5, May 1990, p. 308.
- W. Herreman, "Author's Reply To Frequency Shift In Damped Oscillators", TPT, Vol. 20, #6, Sept. 1982, p. 428.
- Thomas D. Rossing, "Frequency Shift in Damped Oscillators", TPT, Vol. 20, #6, Sept. 1982, p. 354, 428.
- W. Herreman, "Mechanical Resonance On an Air Track", TPT, Vol. 20, #4, Apr. 1982, p. 257.
- Glen Spielbauer, "Damped Oscillator", TPT, Vol. 20, #3, Mar. 1982, p. 188.
- Brother James Mahoney, "Good Timing", TPT, Vol. 19, #7, Oct. 1981, p. 448.
- Dennis E. Kelly, "The Electro-Magnetically Damped Mechanical Oscillator", TPT, Vol. 19, #5, May 1981, p. 327.
- Thomas B. Greenslade Jr., "Damped Simple Harmonic Motion on a Linear Air Track", TPT, Vol. 7, #7, Oct. 1969, p. 395.
- Daniel Green and William G. Unruh, "The Failure of the Tacoma Bridge: A Physical Model", AJP, Vol. 74, #8, Aug. 2006, p. 706.
- Rafael M. Digilov, M. Reiner, and Z. Weizman, "Damping in a Variable Mass on a Spring Pendulum", AJP, Vol. 73, #10, Oct. 2005, p. 901.
- Josué Njock Libii, "Demonstration of Viscous Damping in the Undergraduate Laboratory", AJP, Vol. 68, #2, Feb. 2000, p. 195.
- R. C. Greenhow, "A Mechanical Resonance Experiment with Fluid Dynamic Undercurrents", AJP, Vol. 56, #4, Apr. 1988, p. 352.
- Mildred Allen and Erwin J. Saxl, "The Period of Damped Simple Harmonic Motion", AJP, Vol. 40, #7, July 1972, p. 942.
- Borislaw Bilash II and David Maiullo, "Damp the Oscillations", A Demo a Day: A Year of Physics Demonstrations, p. 178.
- Chuck Williamson and John Goree, "Experiment 10 - Underdamped Oscillations", Experiments in Mechanics, Wave Motion, and Heat, Univ. of Iowa Lab Manual, Fall 2000.
- W. Bolton, "34. Damping", Book 1 - Properties of Materials, Physics Experiments and Projects, 1968, p. 54 - 55.
Disclaimer: These demonstrations are provided only for illustrative use by persons affiliated with The University of Iowa and only under the direction of a trained instructor or physicist. The University of Iowa is not responsible for demonstrations performed by those using their own equipment or who choose to use this reference material for their own purpose. The demonstrations included here are within the public domain and can be found in materials contained in libraries, bookstores, and through electronic sources. Performing all or any portion of any of these demonstrations, with or without revisions not depicted here entails inherent risks. These risks include, without limitation, bodily injury (and possibly death), including risks to health that may be temporary or permanent and that may exacerbate a pre-existing medical condition; and property loss or damage. Anyone performing any part of these demonstrations, even with revisions, knowingly and voluntarily assumes all risks associated with them.